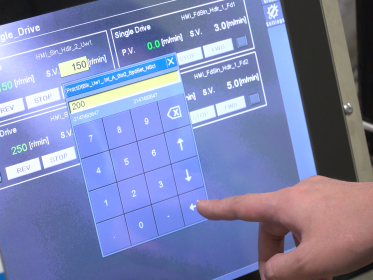
駆動制御システム「System MXs」では、タッチパネル式の操作HMIを用いて、各制御設定や、パラメータ変更等の調整作業を行うことができます。
パソコンや専用の調整ツールを必要としない為、装置立ち上げ時の調整作業を効率化します。
- 駆動制御
- HMI
- 張力制御
- ソフトウェア
- 効率化
- 省力化
- 工数削減
![]()
駆動制御システム「System MXs」では、タッチパネル式の操作HMIを用いて、各制御設定や、パラメータ変更等の調整作業を行うことができます。
パソコンや専用の調整ツールを必要としない為、装置立ち上げ時の調整作業を効率化します。

操作HMIでは、制御に使用する軸や制御方式の選択、ロール径・ギア比・モータ最大回転数といった機械定数の設定、ダンサーや電空変換器のスケーリングといった調整等を行うことができます。初期の使用軸数や制御方式は、事前にヒアリングした内容にて、当社で設定して納品いたします。

使用する軸・しない軸のON/OFF切り替えや、各軸の制御方式を「張力検出器制御」「ダンサー制御」「比率制御」から選択できます。また、速度マスタとする軸も自由に設定できます。
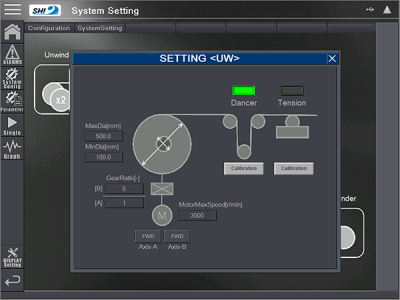
軸の最大径、最小径、ギヤ比、モータ回転方向、モータ最大回転数などを設定できます。
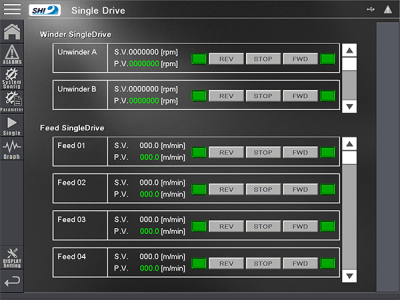
軸ごとにモータ単独運転を行うことで、モータの速度や回転方向などを確認することができます。
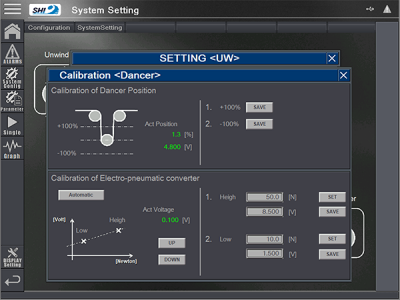
ダンサー調整は、機械側のダンサーを張り限や弛み限に動かし、画面上のアイコンをタッチするだけでスケーリングが完了します。電空変換器は設定張力とその時の印加電圧を入力し、実際の張力を計測しながら微調整を行うことでスケーリングが行えます。
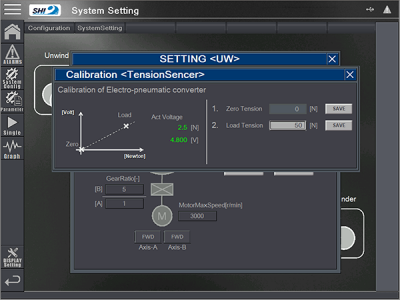
張力検出器は、基材を通していない状態(ゼロ張力状態)と、実際に検出器に張力をかけた状態(例えば最大張力状態)でそれぞれタッチパネル上のアイコンをタッチするだけでスケーリングが完了します。

設定したパラメータをセクションごとに確認することができます。制御ゲインの調整もこの画面で行えます。パラメータはHMIのCPU内や外部記憶媒体へバックアップするこも可能です。
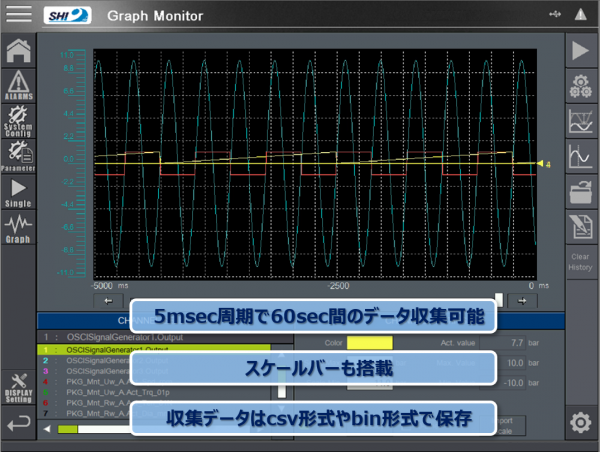
System MXsでは機械の運転中、HMI上で速度、トルク、張力、ダンサー位置の現在値などを5msec周期でグラフ表示することができます。スケールバーも搭載しており、グラフ上で指定した箇所の各数値を確認することができるので、装置の状態や搬送状態の確認などもHMI上で容易に行えます。また、60sec間分の収集したデータをcsv形式やbin形式ファイルでHMIのCPU内に保存できます。保存したファイルをPCへ移行すれば、データの詳細な解析なども可能です。
掲載画像の一部:© SIGMATEK GmbH & Co KG